 最后编辑:2021-06-08
最后编辑:2021-06-08
- 资源介绍
- 更新记录
- 安装教程
摘要
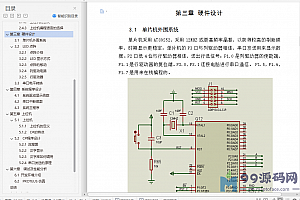
近年来,两轮自平衡车的研究与应用获得了迅猛发展。本文提出了一种两轮自平衡小车的设计方案,采用陀螺仪ENC-03以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。系统选用飞思卡尔16位单片机MC9S12XS128为控制核心,完成了传感器信号的处理,滤波算法的实现及车身控制,人机交互等。
整个系统制作完成后,各个模块能够正常并协调工作,小车可以在无人干预条件下实现自主平衡。同时在引入适量干扰情况下小车能够自主调整并迅速恢复稳定状态。小车还可以实现前进,后退,左右转等基本动作。
关键词:两轮自平衡 陀螺仪 姿态检测 卡尔曼滤波 数据融合
Abstract
In recent years, the research and application of two-wheel self-balanced vehicle have obtained rapid development. This paper presents a design scheme of two-wheel self-balanced vehicle. Gyroscope ENC-03 and MEMS accelerometer MMA7260 constitute vehicle posture detection device. System adopts Kalman filter to complete the gyroscope data and accelerometer data fusion.,and adopts freescale16-bit microcontroller-MC9S12XS128 as controller core. The center controller realizes the sensor signal processing the sensor signal processing, filtering algorithm and body control, human-machine interaction and so on.
Upon completion of the entire system, each module can be normal and to coordinate work. The vehicle can keep balancing in unmanned condition. At the same time, the vehicle can be adjusted independently then quickly restore stability when there is a moderate amount of interference. In addition, the vehicle also can achieve forward, backward, left and right turn and other basic movements.
Key Words: Two-Wheel Self-Balance; Gyroscope; Gesture detection; Kalman filter; Data fusion
目 录










猜你喜欢
-
厨房食物垃圾粉碎机设计说明书(论文)+任务书+开题+选题表+翻译及原文+答辩+cad图纸+三维图纸+仿真视频
2021-06-09 -
基于PHP的网上租车租赁网站设计与实现毕业论文+任务书+开题报告+项目源码及数据库+运行说明
2021-06-08 -
基于JSP的项目信息管理系统的设计与实现毕业论文+任务书+中期表+翻译及原文+源码及数据库+辅导视频
2021-06-09 -
基于PHP的校园新闻网站开发毕业论文+开题+答辩+设计源码+安装方法
2021-06-10 -
基于NB-lot的远程智能温度控制系统研究(硕士论文开题报告)
2021-06-09 -
基于Hopfield的TSP问题求解软件程序设计与实现毕业论文+答辩PPT+源程序及实验结果
2021-06-08 -
基于单片机的车速控制语音报警系统 说明书(论文)+PCB文件+原理图仿真+程序+实物图
2021-06-08 -
基于VUE的教室预约系统的设计与实现毕业论文+项目源码及数据库
2021-06-08 -
QH美容美体连锁企业营销策略研究硕士论文开题报告
2021-06-10 -
Linux下网络流量监控优化设计论文+开题报告+设计源码
2021-06-10
-
基于SSH的医院预约挂号系统设计与实现毕业论文+任务书+中期表+翻译及原文+答辩PPT+源码+数据库+辅导视频
2021-06-08 -
果蔬切割机的设计说明书论文
2021-06-08 -
机械工程学院2020届毕业设计(论文)工作实施细则
2021-06-08 -
基于JavaWeb的在线学习网站设计与实现毕业论文+任务书+中期检查表+答辩PPT+项目源码及数据库文件
2021-06-08 -
五邑大学本科生毕业设计(论文)格式规范
2021-06-08 -
基于Java socket的网络聊天室的设计与实现毕业论文+任务书+开题+答辩PPT+源码+辅导视频
2021-06-09 -
基于VC++包过滤技术防火墙设计与实现毕业论文+项目源码及EXE运行文件
2021-06-08 -
热处理上下料机械手结构设计说明书(论文)+任务书+评语+外文翻译及原文+cad图纸
2021-06-08 -
基于JavaWeb的健身俱乐部会员管理系统设计与实现毕业论文+任务书+中期表+答辩PPT+翻译及原文+源码+数据库+辅导视频
2021-06-08 -
手推式除草机(无引擎)设计 说明书(论文)+任务书+开题报告+CAD图纸+Solidworks三维图纸
2021-06-08
猜你在找
99源码网 » 基于单片机MC9S12XS128的两轮自平衡小车设计毕业论文+原理图+实物制作教程+下机位程序及app安装文件+视频演示地址
常见问题FAQ
- 免费下载或者VIP会员专享资源能否直接商用?
- 本站所有资源版权均属于原作者所有,这里所提供资源均只能用于参考学习用,请勿直接商用。若由于商用引起版权纠纷,一切责任均由使用者承担。更多说明请参考 VIP介绍。
- 提示下载完但解压或打开不了?
- 找不到素材资源介绍文章里的示例图片?
- 99源码网
- 2021-06-08Hi,初次和大家见面了,请多关照!