 最后编辑:2021-06-09
最后编辑:2021-06-09
- 资源介绍
- 更新记录
- 安装教程
若有个人部署运行问题,点击右侧客服按钮咨询站长
站长联系方式
QQ:3484724101
摘 要
本次设计自动避障小车就是基于单片机这一系统开发而成的。此外本设计还加入了液晶显示部分。同时本次设计可全面提高个人对单片机技术、传感器技术智能控制技术、计算机控制技术知识的综合应用能力。掌握从系统级、电路级到芯片级各层次的设计和实现手段。在此设计过程中,将会用到多门学科的理论知识,是对以前所学知识的一个全面的复习和巩固,更重要的是培养自我分析问题和解决问题的能力,还增强了实际的动手能力。
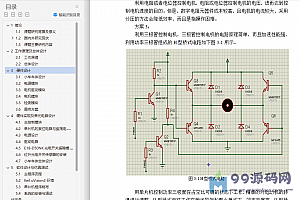
设计采用STC89C52作为控制电路,把两个红外信号接到单片机上,通过单片机对信号的接收和处理,控制外围电路使小车转向,来避开障碍物。通过H桥驱动电路来控制电机的转向和前进。通过为微控制芯片对数据进行处理,处理速度远远满足小车的运行和避障的需求。也可以通过编写不同的程序,增加模块来增加小车的功能。它通过红外线传感器获知前方的障碍物情况,若不存在障碍物,小车直线前进;若左前方发现障碍物,左前放的红外传感器将信号传给单片机,单片机作出处理后控制小车向右转弯以躲开障碍物;若右前方发现障碍物,右前放的红外传感器将信号传给单片机,单片机作出处理后控制小车向左转弯以躲开障碍物;若正前方发现障碍物,则两个红外传感器将信号传给单片机,单片机作出处理后控制小车倒车至合适距离后,通过传感器传来的信号决定转弯方向,以躲开障碍物。检测使用的红外传感器是专业的红外避障传感器,当有障碍物时,它能够反映出电平高低的变化,而且更加廉价易得,适合简单的避障。
关键词:自动避障;单片机;小车;红外线
Abstract
This design of automatic obstacle avoidance car is based on the single-chip microcomputer this system is developed. In addition, this design also added liquid crystal display part. At the same time, this design can improve the comprehensive application ability of single-chip computer technology, sensor technology intelligent control technology, computer control technology knowledge in an all-round way. Master all levels of design and implementation from system level, circuit level to chip level. In this design process, the theoretical knowledge of many subjects will be used, it is a comprehensive review and consolidation of the knowledge learned before, more important is to cultivate the ability of self-analysis and problem-solving, but also to enhance the practical ability of hands-on.
The design adopts STC89C52 as the control circuit, two infrared signals are connected to the single-chip microcomputer, the signal is received and processed by the single-chip microcomputer, and the peripheral circuit is controlled to turn the car to avoid the obstacle. The H-bridge driving circuit is used to control the steering and advance of the motor. By processing the data for the micro-control chip, the processing speed can meet the demands of the running and obstacle avoidance of the car. You can also add modules to increase the function of the car by writing different programs. If there is no obstacle, the car goes straight ahead; if the obstacle is found in front of the left, after the single-chip processor makes the processing, controls the car to turn to the right to avoid the obstacle; If the obstacle is found in front of the right, the infrared sensor in front of the right will transmit the signal to the single-chip microcomputer. After the single-chip processor makes the processing, the control car will turn to the left to avoid the obstacle; If the obstacle is found in front, the two infrared sensors transmit the signal to the single-chip microcomputer. After the single-chip microcomputer makes the processing, the car is controlled to the appropriate distance, and then the turning direction is determined by the signal from the sensor in order to avoid the obstacle. The infrared sensor used in the detection is a professional infrared obstacle avoidance sensor. When there are obstacles, it can reflect the change of the level. It is easy to get and easy to get. It is suitable for simple obstacle avoidance.
Key words: automatic obstacle avoidance; single chip microcomputer; car; infrared ray
目 录










猜你喜欢
-
基于JavaSwing的连连看游戏的设计与实现毕业论文+任务书+中期表+翻译及原文+答辩+源码+辅导视频
2021-06-09 -
灌装机的供瓶机构设计说明书(论文)+课题申请表+开题报告+CAD图纸
2021-06-08 -
基于Html的购物网站的分析与设计毕业论文+html静态源码
2021-06-08 -
停车场的道闸系统设计毕业论文+任务书+初稿+CAD图纸
2021-06-08 -
S环形避障装置研究与设计毕业论文+solidworks模型+动画
2021-06-10 -
某学生宿舍楼建筑结构设计毕业论文+任务书+开题+文综+翻译及原文+cad图纸
2021-06-09 -
基于AT89C51单片机的直流数字电压表设计毕业论文+任务书+Proteus代码+电路图+源码
2021-06-08 -
社团管理系统网站(PHP+Mysql)毕业论文+设计源码
2021-06-10 -
基于JAvaWeb的个人信用卡管理系统设计与实现毕业论文+项目源码
2021-06-08 -
5G异构网络中基于节能的机会中继论文+外文及翻译+程序
2021-06-10
-
注塑机合模装置及液压系统设计 说明书(论文)+CAD图纸
2021-06-08 -
基于振动信号的齿轮故障诊断方法研究仿真毕业论文+任务书
2021-06-09 -
大客车玻璃擦净器设计毕业论文+答辩PPT+cad图纸
2021-06-09 -
毕业设计论文撰写格式规范
2021-06-08 -
吉利4G15发动机正时系统装配工艺 毕业设计论文
2021-06-08 -
基于STC89C52单片机的蔬菜大棚实时温度测量控制系统 毕业论文+PROTUES 仿真+Keil程序
2021-06-08 -
抚顺职业技术学院毕业设计(论文)规范化要求
2021-06-08 -
流浪动物救助服务网站设计与实现毕业论文+开题报告+J2EE项目源码及数据库+答辩PPT+运行说明
2021-06-08 -
基于asp.net的计算机实验课在线答疑系统设计与实现毕业论文+答辩PPT+演示视频+项目源码及数据库文件+运行说明
2021-06-08 -
基于JSP物流信息查询网的设计与实现毕业论文+任务书+中期表+翻译及原文+源码及数据库+辅导视频
2021-06-09
猜你在找
99源码网 » 自动避障小车控制系统设计毕业论文+任务书+开题+文献综述+翻译及原文+避障程序
常见问题FAQ
- 免费下载或者VIP会员专享资源能否直接商用?
- 本站所有资源版权均属于原作者所有,这里所提供资源均只能用于参考学习用,请勿直接商用。若由于商用引起版权纠纷,一切责任均由使用者承担。更多说明请参考 VIP介绍。
- 提示下载完但解压或打开不了?
- 找不到素材资源介绍文章里的示例图片?
- 99源码网
- 2021-06-09Hi,初次和大家见面了,请多关照!